Los 3 errores más comunes al planificar el vuelo de un dron fotogramétrico.
El uso de drones en el ámbito de la cartografía/topografía tiene una serie de ventajas respecto a los sistemas de captura de datos tradicionales. En este artículo te vamos a contar los 3 errores más comunes que se cometen a la hora de planificar el vuelo de un dron. Si quieres conseguir un producto final de calidad, continua leyendo para evitarlos.
1. Falta de solape
En este tipo de trabajos es necesario tanto un solape longitudinal como transversal. Normalmente estos valores se sitúan en torno al 60% - 80% en ambos ejes. Con estos valores obtendrás buenos resultados en trabajos de orografías planas. Sin embargo, si nuestro dron no cuenta con capacidad para mantener una distancia progresiva respecto al terreno es tener tendrás problemas en orografías más pronunciadas, teniendo en las cotas más altas perdidas de solape. Si no tienes en cuenta esto, estarás cometiendo uno de los errores más comunes a la hora de planificar el vuelo de un dron.
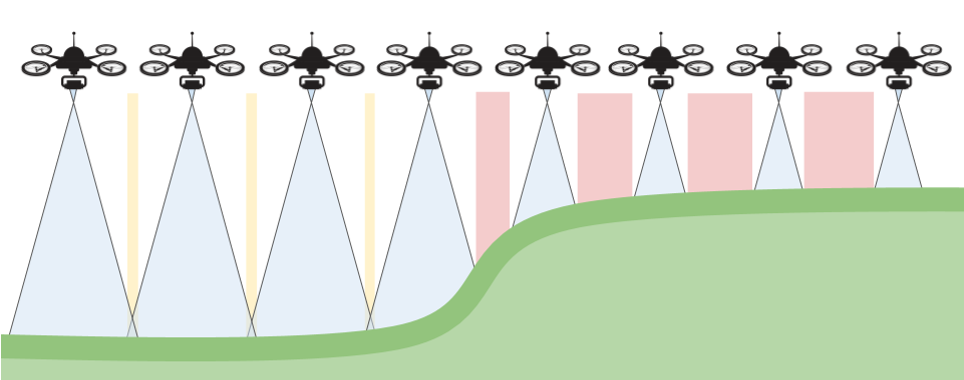
En este grafico puedes ver representada la proyección de las imágenes (azul) con su correspondiente solape (amarillo). Como puedes ver, si no tienes en cuenta la orografía del terreno y este es cambiante, nuestro solape longitudinal se verá disminuido o será incluso nulo (en rojo).
El resultado de la falta de solape una vez procesadas las imágenes. La ortoimagen resultante tiene falta de información en la parte central debido que esa zona era la zona más alta y tuvo una falta de solape. Para solucionarlo, probablemente se tendrá que volver a realizar el vuelo, con los gastos que ello acarrea.

2. Mala calidad de imagen.
Otro de los errores más comunes a la hora de planificar el vuelo de un dron es la toma de imágenes. Debes de tener en cuenta que la cámara/sensor tiene una serie de parámetros. De manera que, si alguno de ellos no está bien configurado para el tipo de imágenes que pretendemos tomar, arruinaran nuestro trabajo y nos obligará a tener que repetirlo.
Te mostramos algunos de los parámetros que normalmente se pueden configurar en nuestras cámaras:
· Apertura del diafragma
· velocidad de obturación
· ISO
· Enfoque
· balance de blancos
No existe una configuración exacta para obtener unas imágenes correctas en todas las situaciones. Esto se debe a que existen otros parámetros como la velocidad de vuelo, altura del vuelo o la iluminación del día. Aunque sí que existen configuraciones que hacen tener imágenes exitosas en el 80% de las situaciones de vuelo.
A continuación te mostramos algún ejemplo de falta de calidad en las imágenes.
Imágenes desenfocadas

No hay mucho de qué hablar aquí. Con una imagen desenfocada será imposible tener un producto de alta calidad. Algo que se espera en un vuelo fotogramétrico realizado con dron.
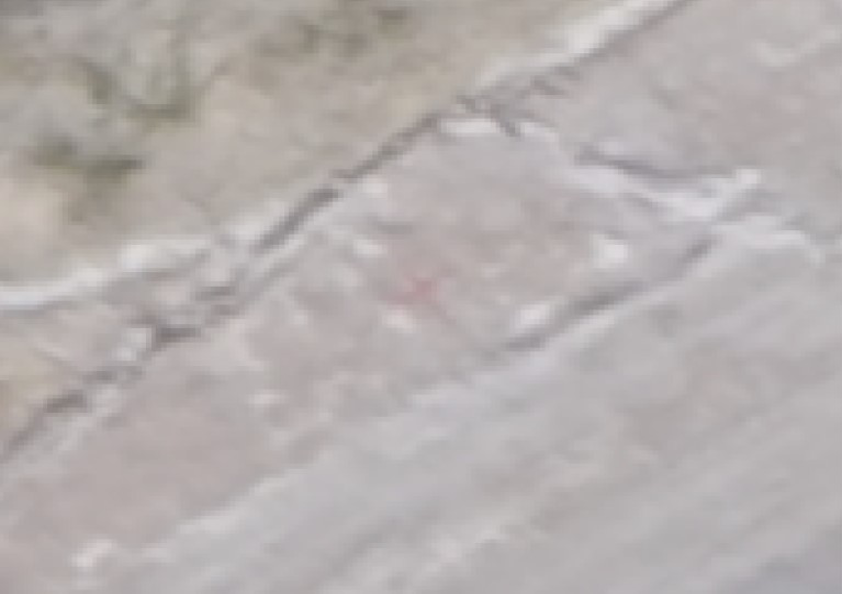
El problema aquí es un detalle de un punto de control. Si…, aunque no lo parezca está ahí, se puede intuir una X roja en el centro de la imagen. Pero debido al desenfoque apenas se puede percibir. Así que imagínate la precisión que se puede esperar de estas imágenes.
Viñeteados

En este otro caso, la imagen se encuentra perfectamente enfocada. Sin embargo, debido a un mal ajuste del diafragma (en su máxima apertura es más fácil tener problemas de viñeteado) y al volar con el sol en la vertical, la imagen se encuentra con uno de sus bordes aparentemente más iluminados que el resto, produciendo este resultado una vez procesado.

En esta ortofoto resultante se pueden ver los problemas que este tipo de imágenes producen. Puedes ver una serie de franjas a lo largo del mapa, coincidiendo además paralelamente con las líneas de vuelo que se realizaron.
3. Fallos de apoyo/puntos de control.
Desde Helixnorth siempre recomendamos el uso de apoyo topográfico en tierra mediante tecnología gnss. De esta manera nuestros resultados estarán siempre perfectamente georreferenciados bajo el sistema de referencia establecido.
Otro de los errores más comunes a la hora de planificar el vuelo de un dron es que el GCP no sea fácilmente reconocible desde las imágenes. Muchas veces los técnicos de campo usan herramientas de marcaje que normalmente usan en otras tareas, aunque para este tipo de labores no sean las más adecuadas.

El uso de marcas hechas con spray hace que a la hora de seleccionar los pixeles a los que corresponde el GCP no sean fácilmente reconocibles, haciendo que el proyecto pierda precisión.

En este otro caso se ha usado un target que ayuda a la hora de seleccionar esos pixeles, pero en este caso aparece un problema también mencionado anteriormente, los problemas de imagen, ocasionando que el GCP sea utilizable, pero no en sus condiciones más óptimas.
Ahora os mostramos un buen ejemplo de cómo debe de ser un GCP o punto de control.

En este caso el target es perfectamente reconocible en su parte central, haciendo de esta manera que la precisión de nuestro proyecto esté en sus mejores condiciones.
Esperamos con este artículo haber podido solucionar algunas de tus dudas a la hora de planificar el vuelo de un dron. Si todavía te quedan dudas sobre la planificación del vuelo de un dron o del procesamiento de imágenes, déjanos tu comentario. ¡Ah! Y si quieres conocer los beneficios de utilizar los drones en topografía, te animamos a que leas este artículo.
5 beneficios de usar los drones en la topografía