Sistema georreferenciado de datos RTK y PPK, ¿cuál es mejor?
Uno de los puntos más importantes a la hora de realizar vuelos fotogramétricos con drones es que la información captada sea georreferenciada. En este artículo explicaremos los sistemas RTK y PPK y cual recomendamos desde Helixnorth.
La gran mayoría de drones utilizados para aplicaciones de fotogrametría disponen de una antena GPS para su navegación de manera autónoma. A su vez, esa misma información GPS suele ser la que se aplica a la georeferenciación de las imágenes, que suelen arrojar precisiones en torno a los 2-3m tanto horizontales como verticales.
Actualmente, ese nivel de precisión GPS es un estándar, el cual dependiendo del proyecto o las necesidades puede ser suficiente. De no ser así, deberemos aplicar puntos de control en nuestro software fotogramétrico para que los productos resultantes dispongan de la precisión y exactitud requerida.

Fig.1
Punto de control para un vuelo fotogramétrico.
RTK y PPK.
Desde hace tiempo los fabricantes de receptores GNSS han conseguido miniaturizar y reducir los costes de los receptores más avanzados, facilitando así su integración en sistemas tan reducidos como pueden ser los drones.
Suelen tener dos modos de funcionamiento: RTK y PPK, pero, ¿cuáles son sus principales diferencias?, ¿y cuál es mejor?
Ambos tienen en común que requieren de dos conjuntos de datos para funcionar: los datos del Rover (en nuestro caso el drone) y los datos de una Base. Esa base puede ser propia e instalada sobre un punto conocido en nuestra zona de vuelo o una base permanente perteneciente (en el caso de España) al Instituto Geográfico Nacional.

Fig.2
Base propia instalada en la zona de vuelo.
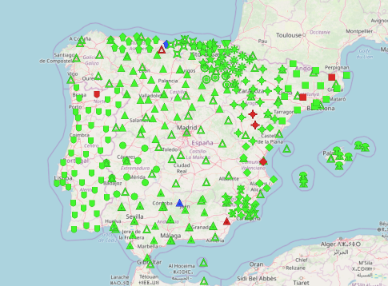
Fig.3
Red de estaciones permanentes del IGN Español y del RENEP Portugués.
Esos conjuntos de datos obtenidos por ambas antenas deben de ser procesados por un algoritmo para arrojar una solución, en este caso la posición del drone con precisión centimétrica en el momento que se tomó la imagen. De esta manera obtendremos precisiones con errores de pocos centímetros.

Fig.4 Tabla de errores en un vuelo con PPK.
La diferencia reside en cómo ambas opciones (RTK y PPK) obtienen esa solución, ya que mientras el RTK lo realiza en tiempo real, el PPK se realiza en postproceso. Vamos a explicar ambas opciones.
RTK.
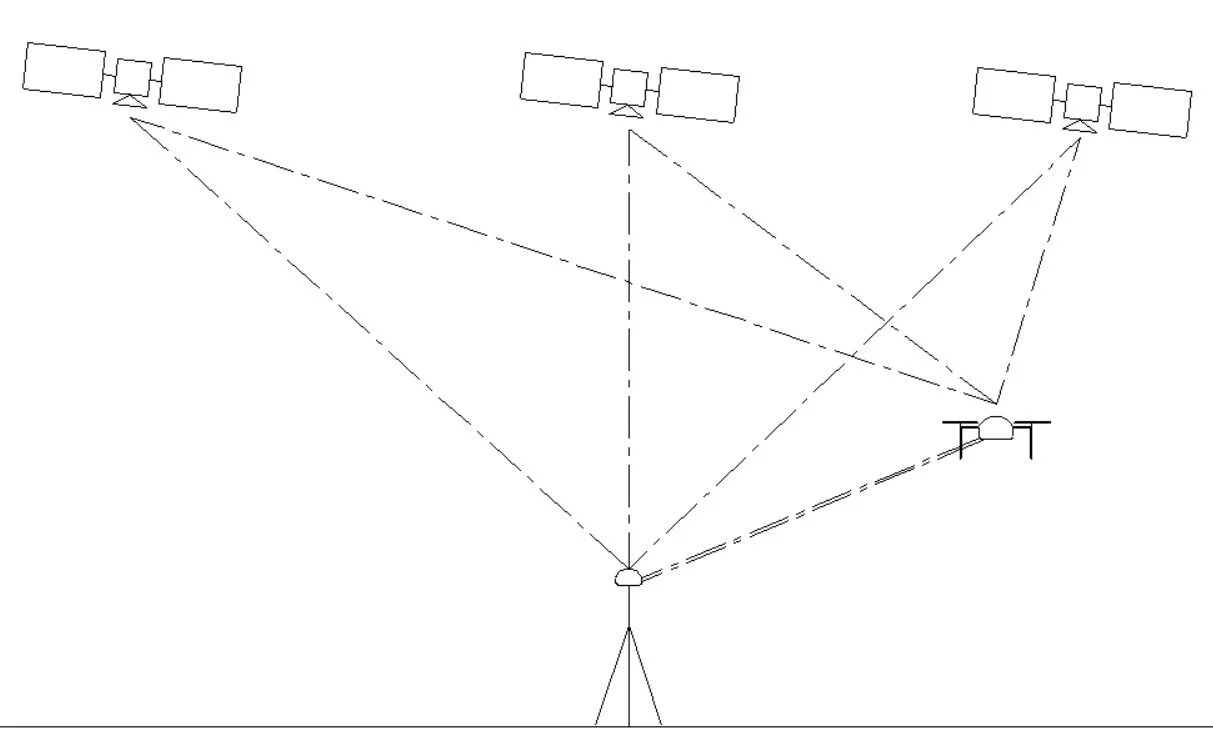
RTK (Real Time Kinematics) indica que es un sistema que funciona en tiempo real.
En esta imagen podemos observar que, tanto nuestra base como nuestro drone, reciben lecturas de las diferentes constelaciones de satélites disponibles. Pero también podemos observar cómo se requiere de un enlace de datos constante entre la base y el drone en tiempo real para que pueda obtener esa solución centimétrica que necesitamos.
PPK.
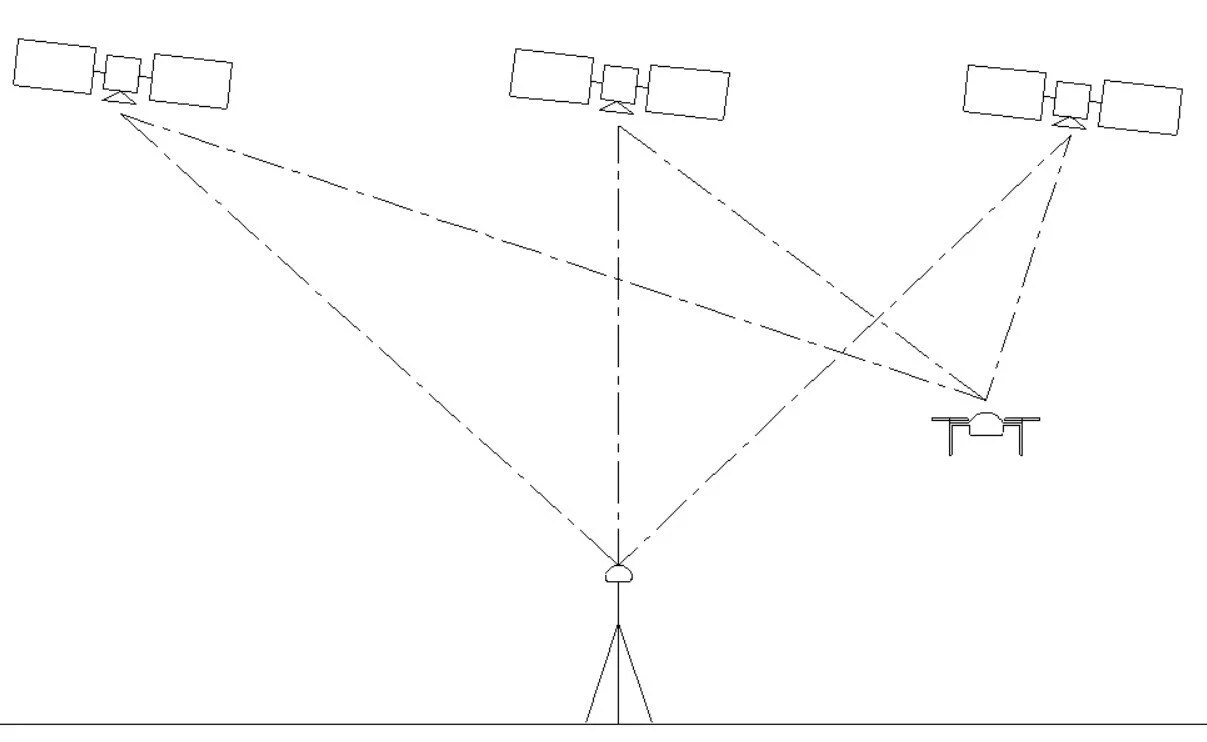
En cambio, el PPK (Post Processed Kinematic) realiza un proceso de datos a posteriori.
En la imagen vemos que, tanto la base como el drone, reciben lecturas de las diferentes constelaciones de satélites. Pero, a diferencia del RTK, no hay un enlace de datos constante entre el drone y la base, ya que ambos registran en una memoria esa información que después del vuelo deberemos descargar, normalmente en archivos con formato RINEX, para postprocesar y obtener nuestra solución.
Entonces, ¿con cuál quedarse?
En principio, ambos sistemas deberían obtener el mismo resultado o solución, ya que el origen de los datos (satélites) son los mismos.
El ámbito de la fotogrametría es una aplicación que requiere de un proceso de los datos (imágenes) a posteriori, por lo que el hecho de añadir el proceso PPK no ralentiza el flujo de trabajo.
Desde Helixnorth recomendamos el PPK, aunque los receptores GNSS que utilizamos también son actualizables a RTK.
RTK necesita de correcciones de su base en tiempo real. Esto se realiza mediante un data link (enlace de datos) que puede ser susceptible a interrupciones momentáneas. Además, si son vuelos BVLOS las interrupciones hacen que el receptor del drone pase de una solución FIX (precisión 1-3cm) a una solución SINGLE (precisión 2-3m). A esto habría que añadir posibles problemas o errores derivados de un mal estacionamiento de la base, haciendo que nuestra posición sea divergente o inconsistente.
Como contrapartida, el RTK en correcto funcionamiento nos proporcionará datos precisos sin necesidad de postproceso.
En cambio, el PPK se presenta como una solución más robusta, ya que no depende de un enlace de datos constante. Además, la puesta en marcha en campo es más rápida, ya que no necesariamente necesitamos conocer nuestra posición de la base antes del vuelo y se puede realizar después del mismo.
También podremos mejorar nuestra posición añadiendo datos de bases permanentes extra o realizar postprocesos con diferentes datos que mejoren nuestra posición y precisión.
Dinos… te ha gustado este articulo?
Si quieres descubrir más acerca del sistema PPK que utilizamos en Helixnorth, haz click aquí.